
Confined Space Robotics - Edge Sensing and Embedded Sensors
Confined space applications require specialized 3D sensors to scan the environment, detect objects, and avoid obstacles. Compared to mainstream sensors being widely used among the robotics community, such as Lidar and machine vision cameras, 3D sensors for confined spaces have additional requirements on the miniature size, ultra-short sensing ranges, and high accuracy.
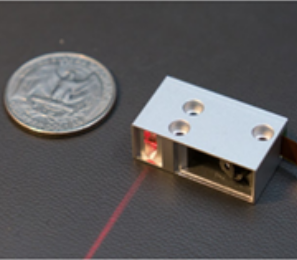
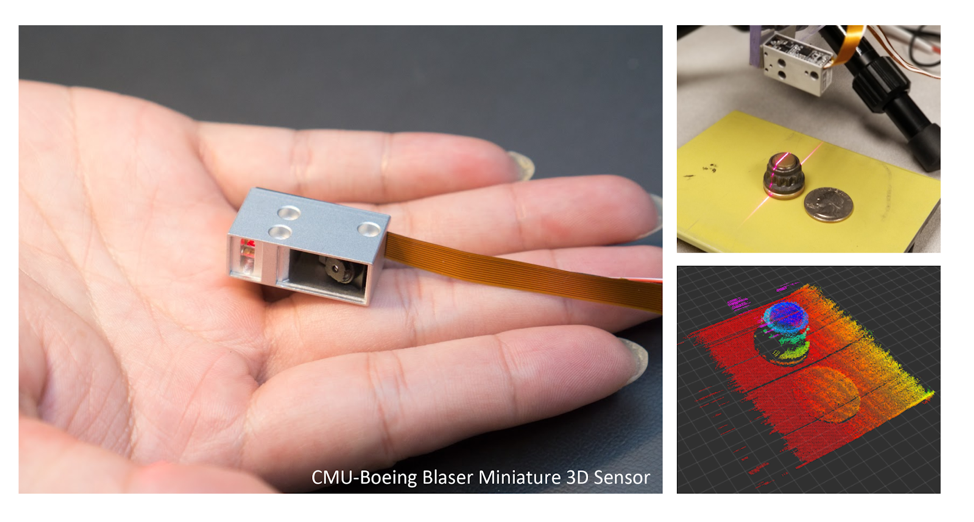
There are no COTS solutions available to fulfill the ultra-short-range but high-precision 3D perception challenge. Most of the commercially available sensor systems are bulky, “farsighted”, and require external computers to perform 3D processing. It would be difficult to even obtain and let alone miniaturize an integrated sensor system, and through our work, we have developed a deep insight into creating these sensors and intelligently processing information from these sensors. The Boeing-CMU team has developed several working prototypes of miniature 3D sensors which are well-suited to confined space manufacturing and inspection applications. The job is not done and hence the CMU team is actively working on improving the hardware performance and software efficiency, and aim to make the sensor (Blaser) become the best option for short-range industrial robotic perception solutions for all applications.
We also must note that most 3D sensors are not robot-ready, they only output raw sensor reading and have no awareness of its host robotic system. In contrast, a robotic enabled sensor should output a command signal to trigger the robot to perform a search or an avoidance maneuver, and simultaneously localize the robot in the environment and generate the 3D map of the surroundings. The Blaser sensor is capable of directly generating and processing 3D point cloud information onboard while providing direct high-level feedback or even command to any ROS-enabled or other robotic systems.
Publication:
D. Cheng, H. Shi, A. Xu, M. Schwerin, M. Crivella, L Li, H. Choset, Visual-Laser-Inertial SLAM Using a Compact 3D Scanner for Confined Space. Conference Paper, IEEE ICRA 2021 Conference, May 2021
D. Cheng, H. Shi, M. Schwerin, M. Crivella, L. Li, and H. Choset, A Compact and Infrastructure-free Confined Space Sensor for 3D Scanning and SLAM. Conference Paper, IEEE SENSOR 2020 Conference, Oct 2020
https://drive.google.com/file/d/1XBK_jUuNg8tLgewcx3wj7nQiMG3YevfS/view