Recycling Robotics - Electronic Waste Recycling
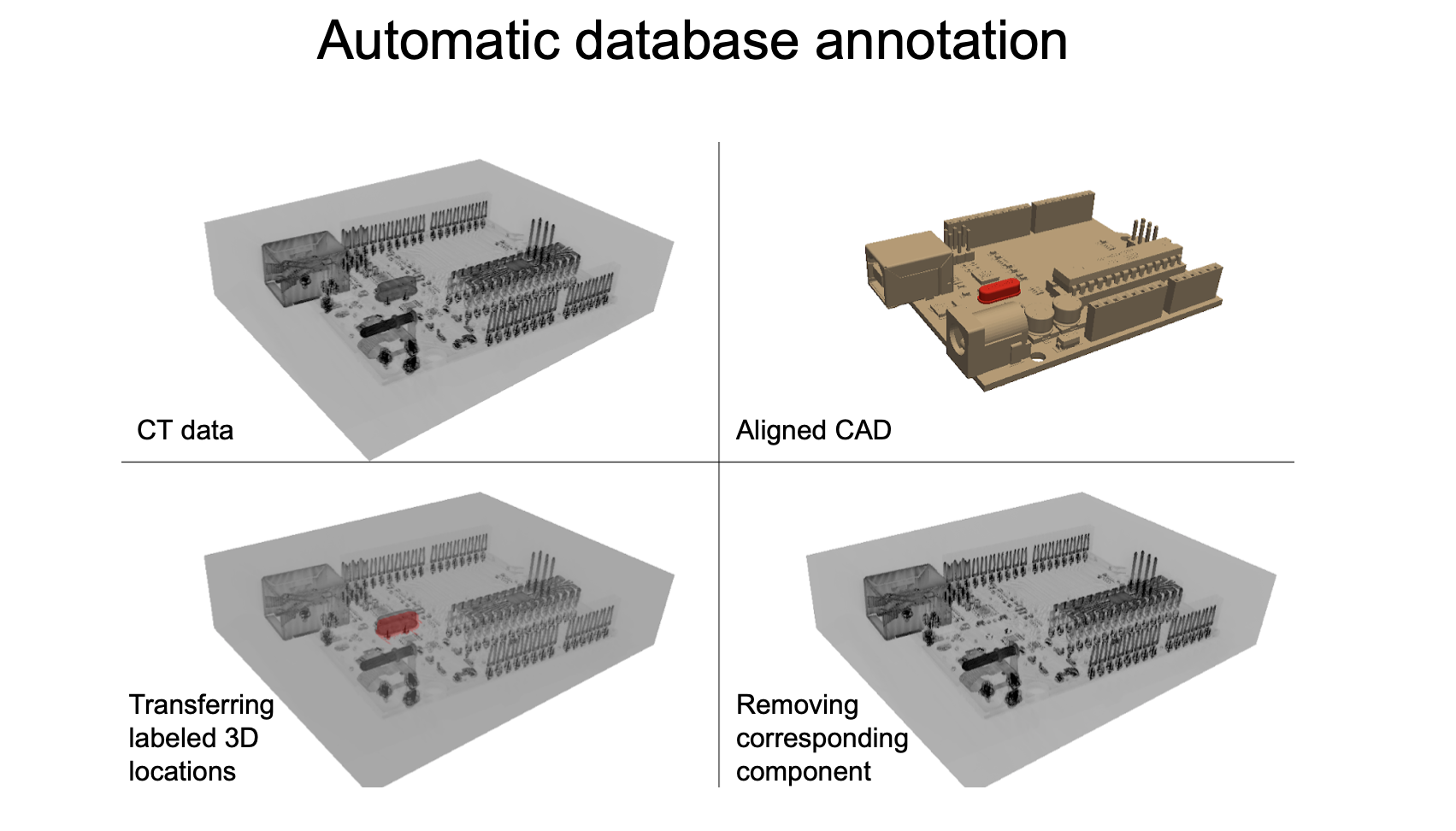
We live in a world where most sensitive information is stored on our devices. Eventually, like many things, those devices are thrown away. Existing waste management has more than half a century of experience in handling materials the right way, but dealing with electronics items poses a new challenge and if not done properly can be hazardous to the environment. The main idea is to identify parts that can be remarketed or recycled. In this work we are trying to classify electronics, develop semantic understanding of their components using X-ray images, manipulate them to respective stations and then autonomously disassemble them to smaller components. The key idea in classification is to train a visual classifier using simulated images and then test it on real world images using domain randomization. We are using an attention based classification approach and trying to combine RGB+ X-ray domain for classification. For developing semantic understanding of the internal components, we are using a state of the art registration approach to match the given electronics with their ground truth label. We are also looking into ways of auto-labelling electronics components for this task. For the manipulation task we have developed a high speed direct drive parallel link manipulator as well as direct drive grippers. Using this we are looking to generalize pick-and-place motion using reinforcement learning and dynamics randomization.