
Confined Space Robotics - Mobile Manipulator for Confined Spaces
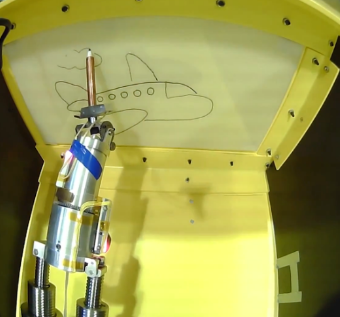
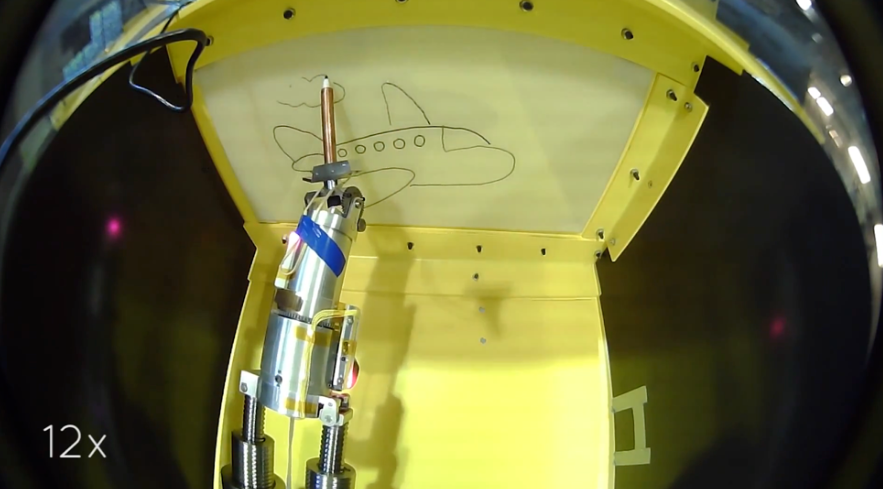
This project seeks to design and develop specialized mobile robots for confined space inspection and manufacturing to replace humans to perform dangerous and hazardous works. Besides, we are also particularly interested in confined space perception and SLAM problems. Several demonstration platforms have been built over the last decades, and our lab is also actively collaborating with industrial partners to provide the revolutionary robotic solution for real-world confined space problems.
Developing a highly reliable and robust real-time control robotic system for confined space manufacturing application requires a cross-disciplinary knowledge of mechatronics, signal processing, control theory, communication and computer science. The CMU team has decades of experience in designing and perfecting custom robotic arm, manipulator, sensor, and its control hardware/software for confined space applications. The CMU Biorobotics lab is one of the most active academic groups whose research and practice includes hyper-redundant novel mechanism design, real-time embedded electronics, bio-inspired perception & control, path-planning, SLAM and other theoretical research in robotics.
The CMU biorobotics lab specialized in design and development of the robotic system which combines real-time embedded system and hybrid real-time Linux with interfaces to traditional ROS or ROS-like software stack, able to closed-loop control a custom designed redundant robotic arm. The ongoing project will keep improving the system performance which enables the non-real-time ROS system to effortlessly interface with high timing critical and low latency hardware.
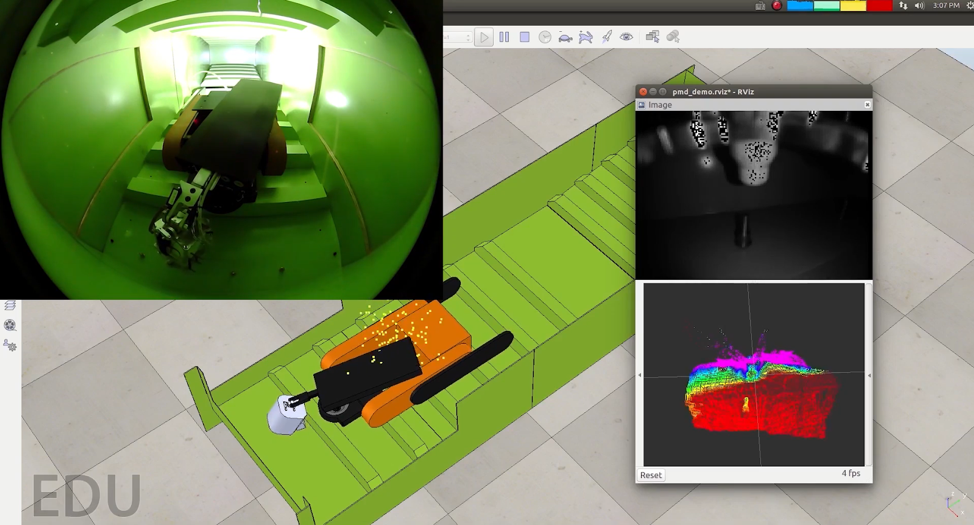
Currently, we are working on a multi-modal approach of combining high-accuracy dense 3D sensor (Blaser), distributed sparse 1D rangefinder (miniature Time-of-Flight ICs), and joints load proprioception(Motor current and back-EMF feedback), to facilitate obstacle avoidance capability to our confined space robotic arm. Furthermore, obstacle and object information also will be tightly included as part of the SLAM and path planning frameworks, to improve dynamic replanning, and online map update.