
Confined Space Robotics - Pipeline SLAM - Robust Mapping in Confined Spaces


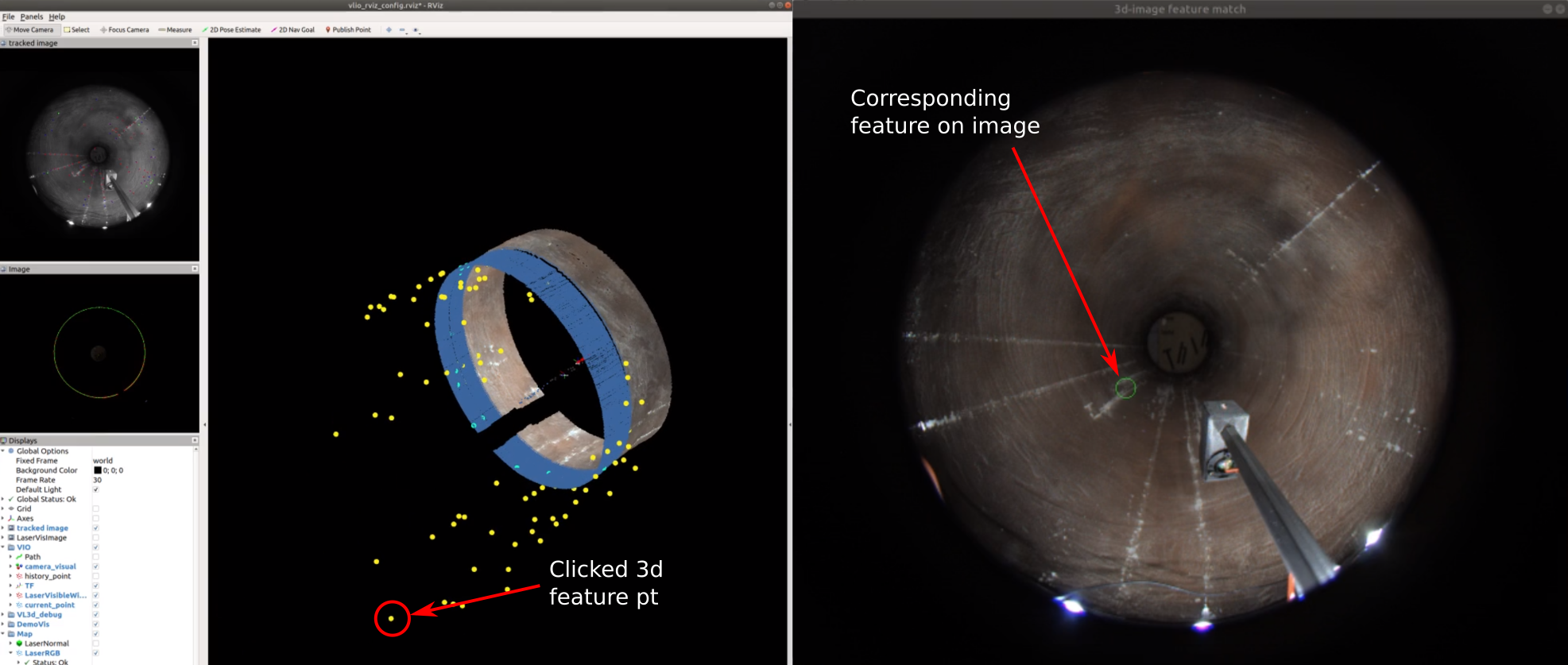
CMU in-pipe mapping and localization sensor payload in a 16-inch pipe (upper-left) 3D RGB-D point-cloud mapping result (upper-right), and the user interface(lower figure).
CMU in-pipe mapping system is a self-sufficient payload consisting of sensors and computation devices. Its compact design enables it to fit into a 12-inch diameter pipe while it can function in wide-range pipes diameters from 12 to 30 inches. Equipped with the CMU award winning multi-modal Simultaneous Localization and Mapping (SLAM) algorithms and custom-designed confined space sensor suite, it is capable of accurate and high-resolution 3D mapping without external computing infrastructure or devices, and it’s intuitive to be integrated to any existing robot platforms. The uniqueness of our colored data output pair with the AI-enhanced texture classification algorithms makes it easy to inspect the surface defect and corrosion autonomously.