
FallingCat
CatAstroФ - Inertial reorientation of a freely falling cat using nonholonomic motion planning
Cats fall, by God’s grace. They are clumsy creatures that jump off tables without thinking. We as humans find that cute and want to study it.
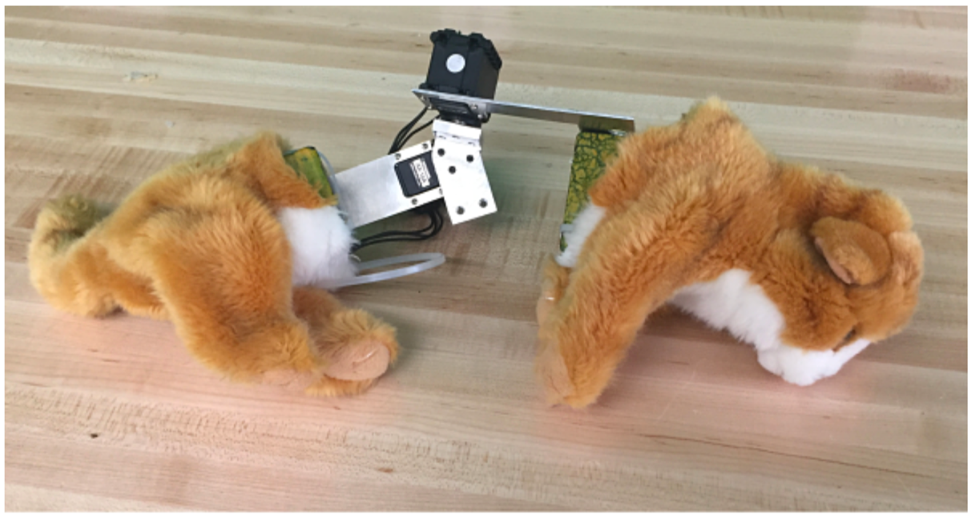
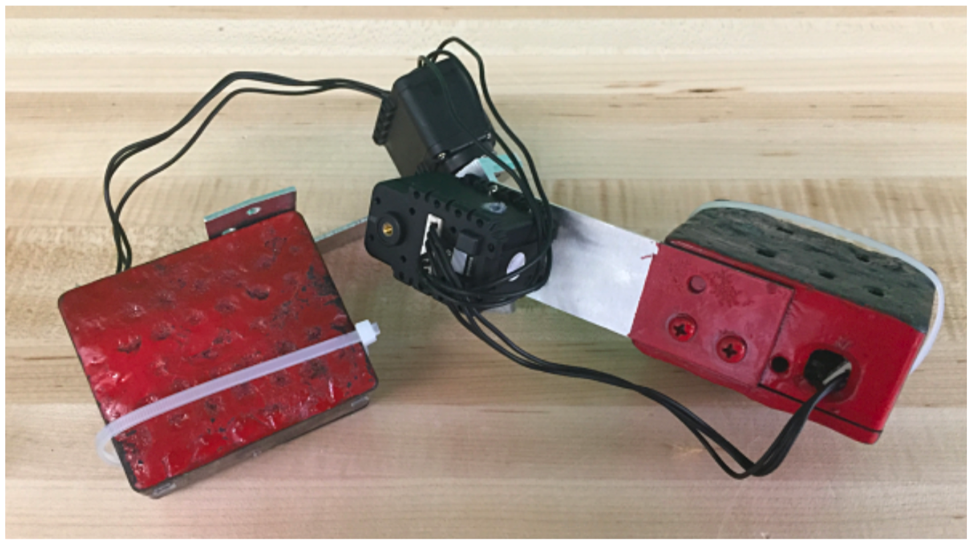
This project involves the design, build, and control of an inertial-reorienting robot, mimicking the cat-righting reflex of our furry feline friends. We constrained the problem to the drop height of a typical room, a cat’s normal domain or cat space, which requires full reorientation in less than 1 second. This consists of a full 180 degree reorientation landing on its feet. We designed and built a two degree of freedom system consisting of two revolute joints at perpendicular offset to accomplish this.
When falling, a cat has an innate ability to reorient mid-air to land on its feet, known as the cat-righting reflex. The purpose of this project was to replicate this biological prodigy by designing and building a robot that can reorient mid-air and land on its feet. Much like a parallel-parking car, the system is nonholonomic and the solution is not a simple step trajectory. To complicate this problem further, the falling cat must reorient very quickly and the dynamics are entangled with inertial coupling. While a cat’s spine has many degrees of freedom and leg movement allows for variable inertia, we simplified the problem to a two degree of freedom model with constant inertia.
- CURRENT ROBOT:
- Open loop trajectory with IMU sensor
- FUTURE ROBOT:
- Stabilizing feedback (almost there)
- Replanning while falling
CURRENT TEAM:
Steve Crews,
Sapan Agrawal,
Sidney “Mickey” Velado
PAST TEAM MEMBERS:
Daniel Piedrahita,
Joey Wood
