Flyped
Flyped - A Flywheel Actuated Biped for Robust and Efficient Robot Locomotion over Varying Terrain
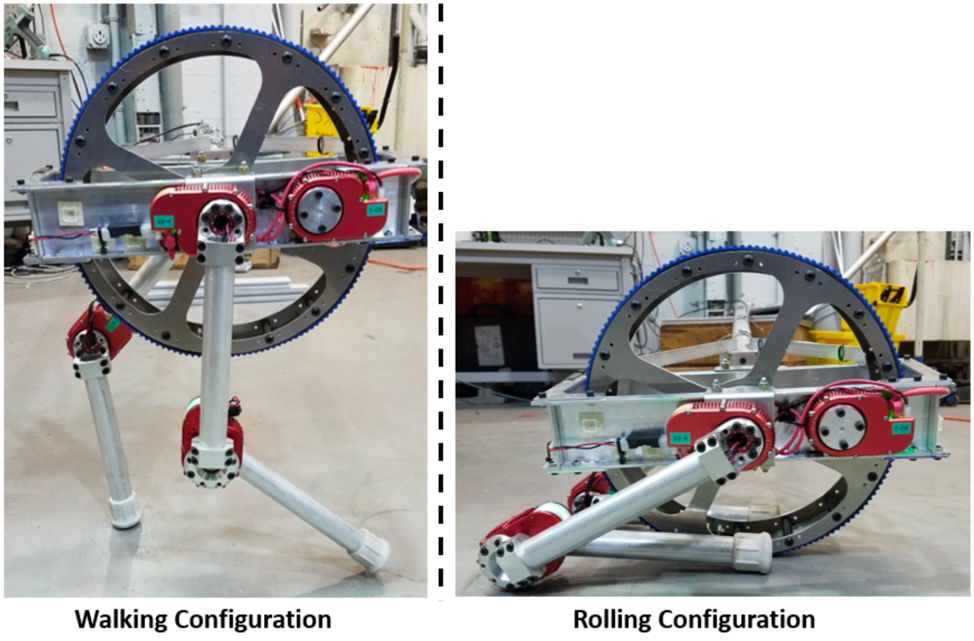
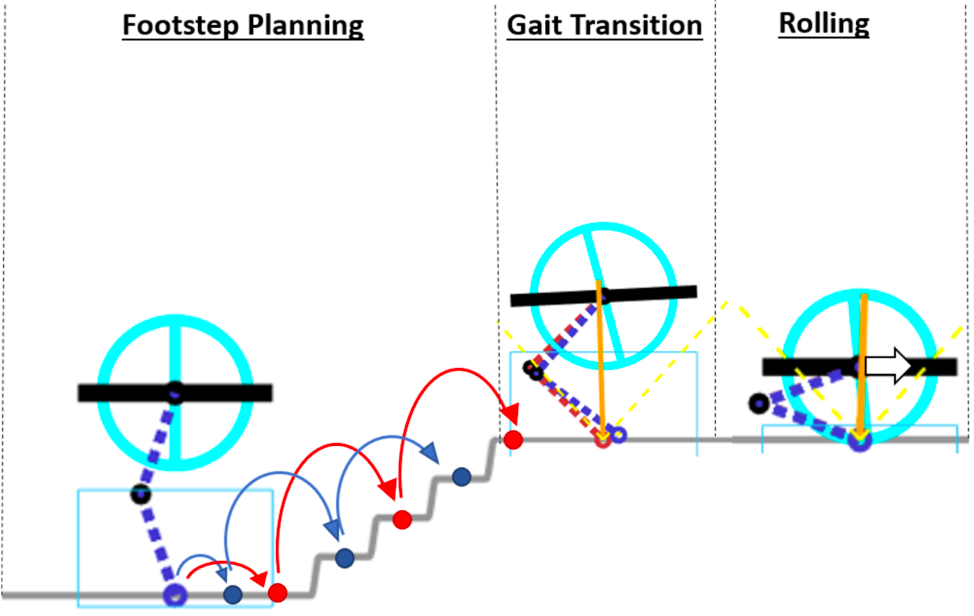
We present a novel wheel-leg hybrid robot morphology that uses a wheel as both an inertial actuator during walking and a drive actuator during rolling. This morphology allows the robot, called the Flyped, to demonstrate more versatile and robust behaviors during legged locomotion when compared to a normal bipedal walking system, while also giving the robot the ability to efficiently roll when it encounters flat, structured terrain. To evaluate the feasibility of Flyped and compare it with similar systems, a hierarchical motion planning framework is presented that can generate and track energy-optimal multi- modal locomotion trajectories over varying terrains, and we verify the robot’s ability to execute these trajectories in simulation. We then detail the design and development of a physical prototype Flyped robot and perform experiments that evaluate both the robustness and efficiency of the reaction wheel-leg hybrid morphology. Simulation results demonstrate that the Flyped achieves both significantly improved disturbance rejection during legged locomotion and dramatic efficiency gain through rolling locomotion. These results suggest that a reaction wheel-leg hybrid robot system is a promising robot morphology that improves on the current state-of-the-art in both locomotive efficiency, versatility, and robustness.