
Modular Array
We are developing an alternative method for manipulating objects in the plane, where many small manipulation cells fixed in a planar array cooperate to handle objects. In our system, each cell consists of a pair of actuators whose combined action can effect force in any planar direction to a parcel resting on top of the array. Furthermore, each cell contains up to five binary sensors which detect the presence of an object. See Figure 1.
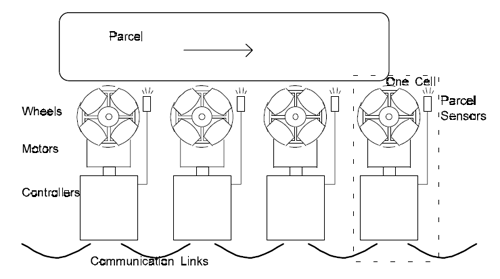
Figure 1. A few manipulator cells carrying a parcel.
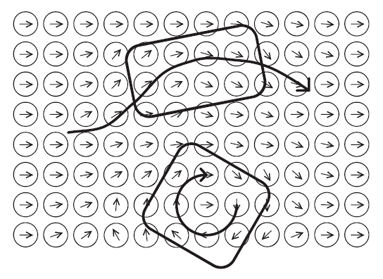
Figure 1. A few manipulator cells carrying a parcel.
In our system, the parcels are signifcantly larger than each cell; several cells handle a single object. Through proper coordination, parcels which ride on top of the array can be made to translate and rotate in the plane. Since sensing and actuation are distributed, each of many parcels can be manipulated independently, appearing as if each parcel were carried by a separate vehicle (Figure 2). Hence, the name Virtual Vehicle.
For many applications, a dedicated robot or conveyor is the simplest and most appropriate solution. There are cases, however, where features, such as additional flexibility and reconfgurability, are required. In these cases, the Virtual Vehicle possesses many advantages, including
- Flexibility. Since the actuation is distributed, multiple parcels can be manipulated independently. This allows for parcels to be sorted, re-ordered, and re-directed quickly. Objects of many sizes and shapes can be passed along easily, and multiple object pathways can be invoked in parallel.
- Redundancy. Since the Virtual Vehicle System is a massively parallel array of cells, if one cell breaks, the neighboring cells work around the broken cell by either diverting parcels around the broken cell or simply passing parcels over it.
- Modularity/Reconfigurability. Many cells can be produced at a low cost because of their small size and relative simplicity. The cells are designed to "snap" together to form an array. This modularity allows the cells to be arranged in any confguration. The array can be easily reconfigured by moving cells and adding new cells. The modularity also enables easy repair because a broken cell is simply replaced.
- Scalability. Cells can be designed to carry objects of all sizes. For example, micromachined actuators can carry near-microscopic objects such as integrated circuit components, whereas small plastic wheels can carry suitcases (of many sizes) through airports and large truck tires can carry box cars around a ship/train yard.
The Virtual Vehicle can be used in conjunction with traditional robots and conveyor belts to form hybrid systems. For example, in airport baggage handling, long conveyors can be used to transport parcels over long distances while Virtual Vehicle arrays can be installed at conveyor junctions to sort and to re-direct parcel traffic. In flexible manufacturing, the Virtual Vehicle can be used to transport objects between robot workspaces where simple robots are used for object fixturing.
We have built a prototype system consisting of a small array of cells capable of transporting ob jects about the size of a bread box. Each cell consists of a pair of orthogonally oriented motorized roller wheels (Figures 3 and 4) which are capable of producing a force perpendicular to their axes, while allowing free motion parallel to their axes. Each wheel is driven through a gear reduction by a small DC motor.
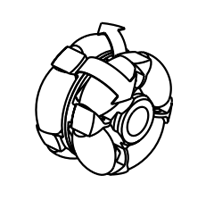
Figure 3. Roller wheel.
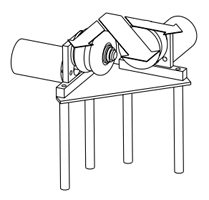
Figure 4. Prototype cell.
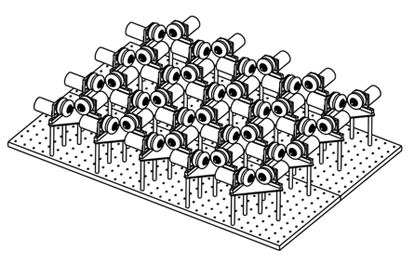
Figure 5. Two-dimensional array of cells.
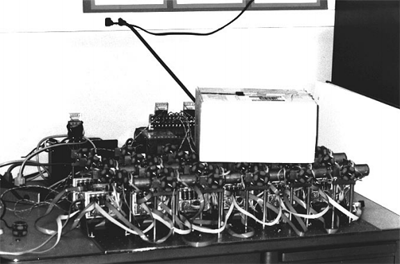
Figure 6. Current experimental setup.
Each of these cells is connected to a large breadboard style base (Figure 5) to create a regular array of manipulators. Currently, we have only 18 cells which can be arranged either in a single 1-D or a 2-D grid. A photograph of the experimental setup is shown in Figure 6.
Papers
- Open Loop Orientability of Objects on Actuator Arrays (1999)
- Discrete Actuator Array Vectorfield Design for Distributed Manipulation (1999)
- Stick-Slip Operation of The Modular Distributed Manipulated System (1998)
- Velocity Field Design for the Modular Distributed Manipulator System (1998)
- Virtual Vehicle: Parcel Manipulation and Dynamics with a Distributed Actuator Array (1997)