
Modular Co-bots
Modular robotic systems have the potential to be adapted to varying tasks using a single set of reconfigurable hardware, enabling customizable robots to be developed faster and more economically than conventional robots. Currently, even with the engineering experience, calculations and intuitions, it is not immediately evident how to construct and program a modular robot for a task. We research methods to automatically synthesize the design and controllers for modular robot arms.
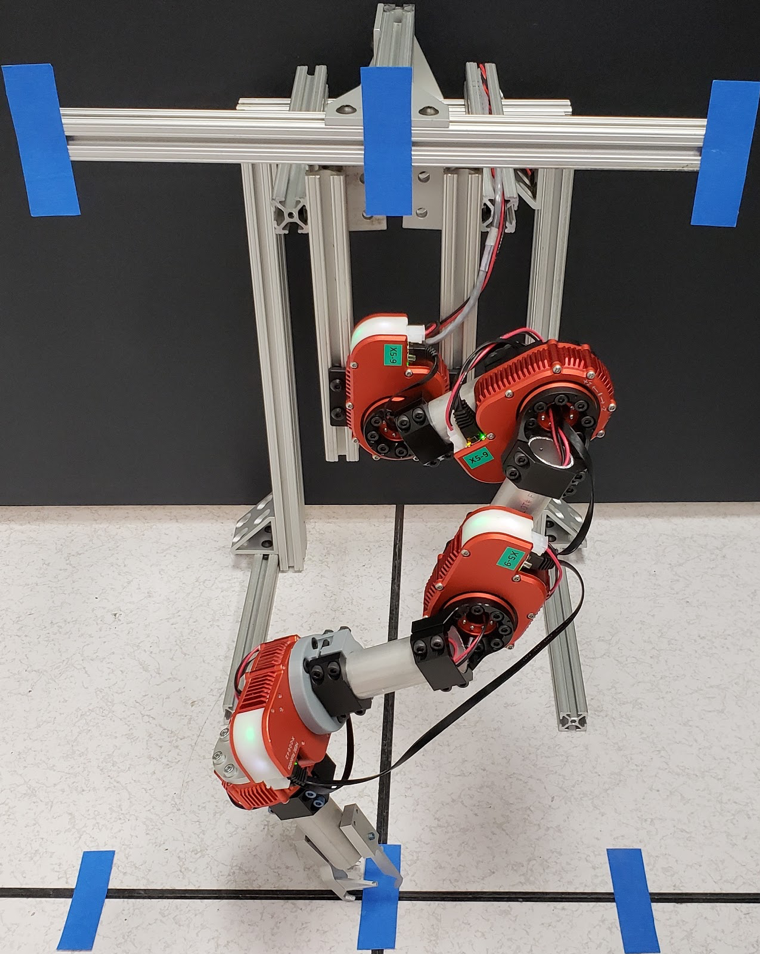
Figure2 : A prototype of a robot arm made from HEBI modular actuators.
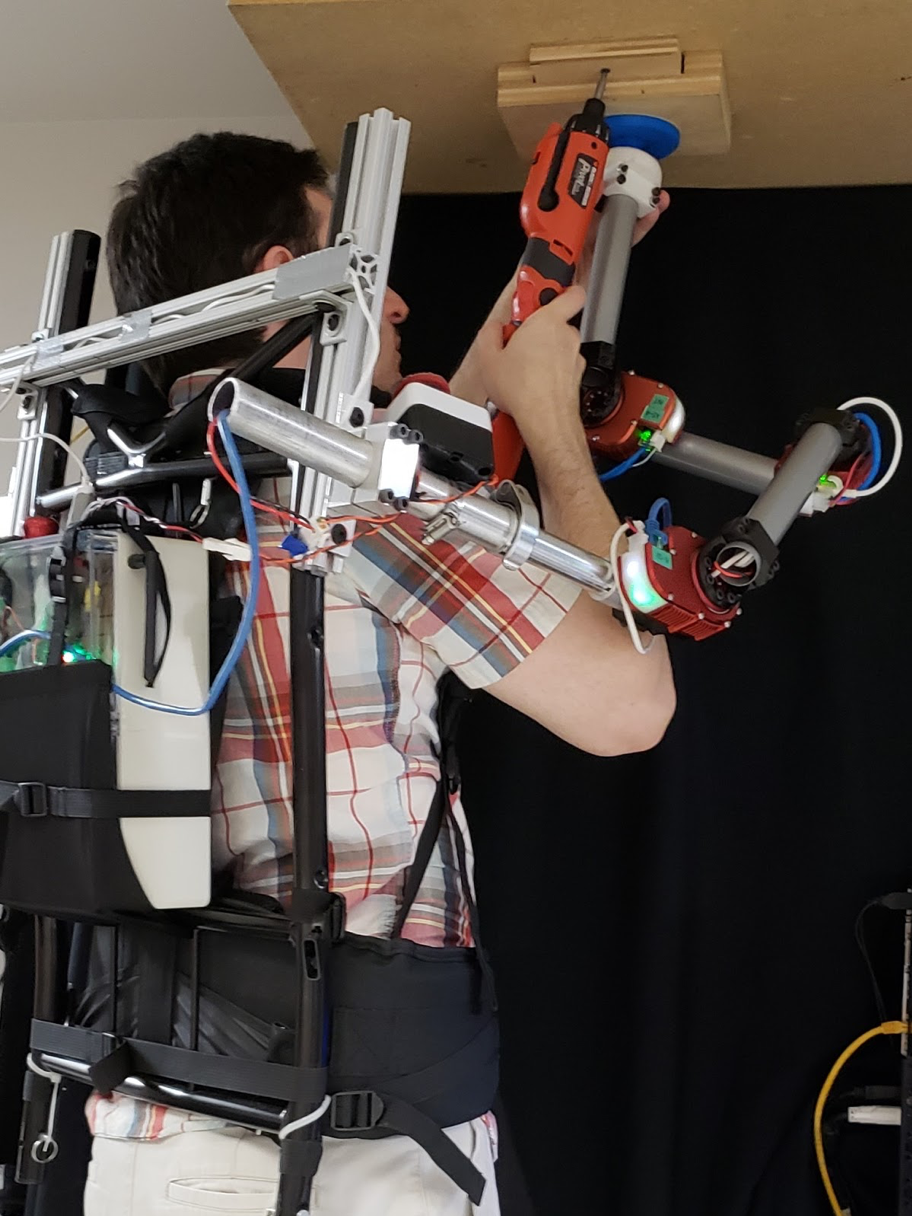
Figure 1: Supernumerary arm implemented in hardware, reaching one of the targets on the overhead workpiece. The end effector is a flat rubberized plate with spring-loaded hinge. The arm, attached to a backpack control and power pack, lends the user a helping hand