
Modular Outdoor AGV
We are developing a series of outdoor UGVs (Unmanned Ground Vehicle) to support our research in SLAM and motion planning in challenging, unstructured terrain such as tunnel networks, urban environments, and natural cave systems. The vehicles use modular HEBI components and can be quickly configured and reconfigured with different mechanical and sensory payloads.
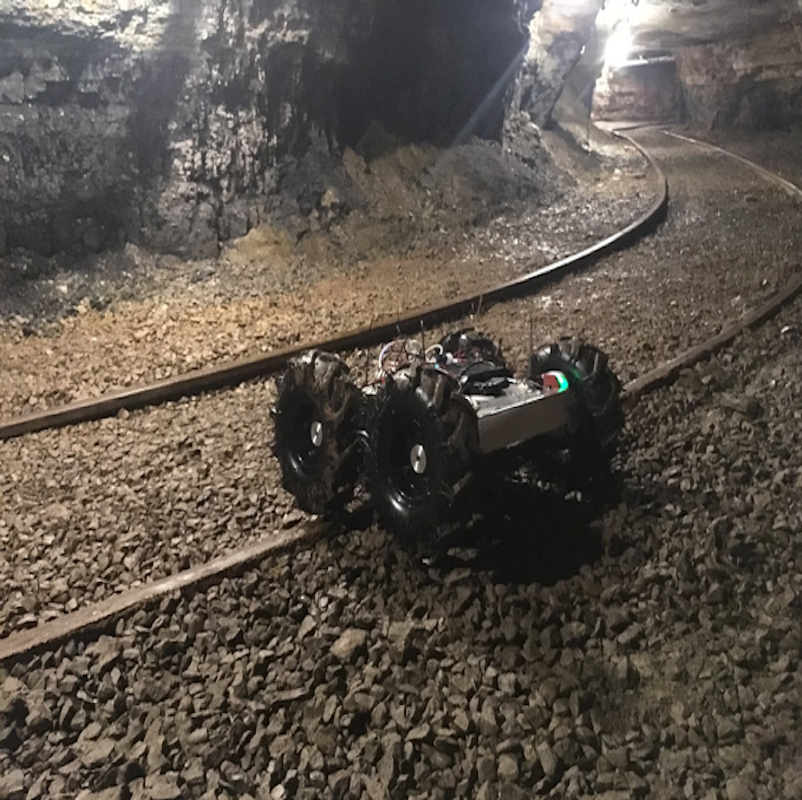
Robot in coal mine outside Pittsburgh, PA
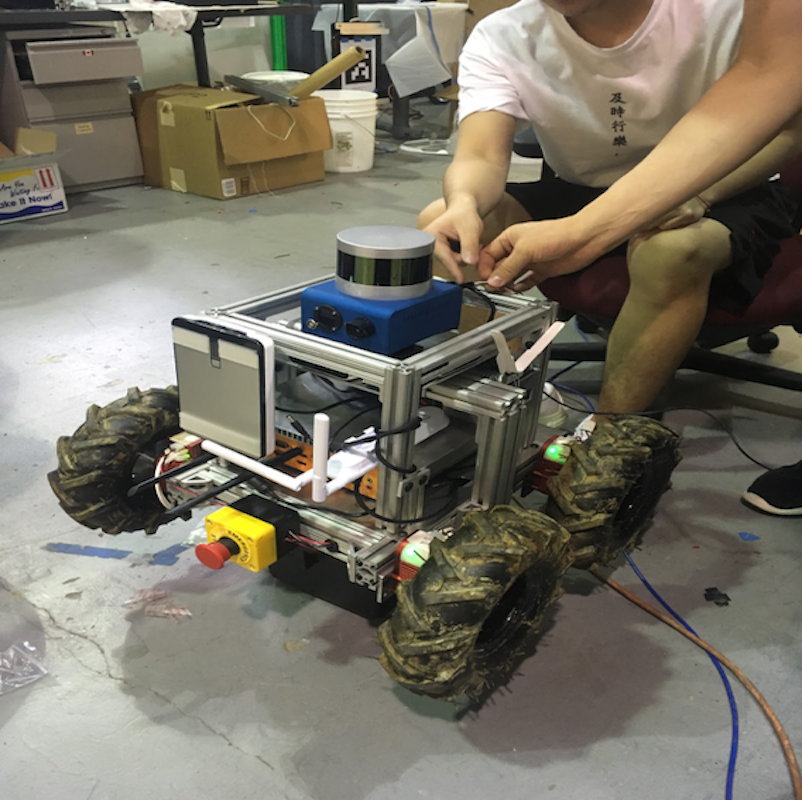
Robot outfitted with mapping payload