
SEA Modularity
We present a set of modular series-elastic actuators (SEAs) that allow rapid and robust prototyping of mobile legged robots. The SEA modules were originally developed for a snake robot, SEA Snake, and have recently been reconfigured into Snake Monster, a multi-modal walking robot that can be easily adapted to hexapod, quadruped, and biped configurations. The use of SEAs allows the implementation of a compliant hybrid controller using both position and force-based walking. This paper presents the mechanical design, control architecture, and initial locomotion experiments using the Snake Monster platform. Additionally, we discuss the enhanced capabilities, pertaining particularly to search and rescue applications, enabled by the use of our modular hardware. Finally, we highlight how these modules provide a powerful tool for both field deployment requiring locomotion and manipulation tasks.
The Snake Monster robot is a reconfigurable search and rescue robot built with reliable field-tested hardware. By using parallel position and force control, Snake Monster is able to actively and passively conform its footsteps to traverse unmodelled terrain with relative ease and minimal computation. Using the mechanical spring compliance built into each joint, Snake Monster conforms to uneven terrain rather than explicitly planning and optimizing footholds and step locations

Modular Design
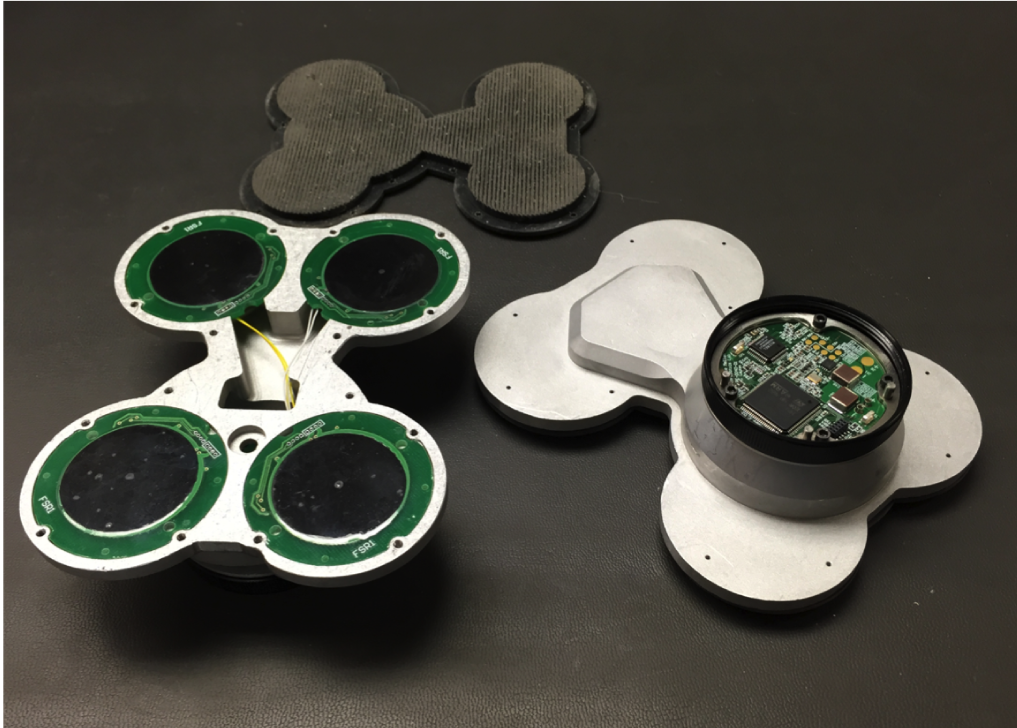
The SEA Snake and Snake Monster robots consist of actuated, 1-DoF modules shown in Figure 1. Each module is a self-contained joint allowing for 180 degrees of rotation. The modules have distinct proximal and distal electromechanical, intermodule interfaces which are used to fasten two adjacent modules. Modules are mechanically connected by a simple threaded collar which is hand tightened to the female threads on the adjacent module. Dowel pins and matching recesses ensure the modules are mated and clocked correctly. Electrical connections between modules are made using spring-pin connectors and conductive target areas. This design enables modules to be connected and disconnected quickly and repeatedly.

Figure 1: Modular Electro-mechanical interfaces
The intelligent, building-block, modules can be rapidly configured to suit a desired task. In this study Snake Monster was configured into an 18-DoF Hexapod, a 16- DoF quadruped roller-walker, and a 14-DoF Biped. Initial locomotion and balancing experiments were conducted on each legged platform.
Configuration
The quadruped is configured to have four legs - 2 on either side of the same body box. Each of the four legs are augmented with an additional degree of freedom at the ankle for orientation of the foot. Inspiration for this configuration was derived from Hirose's Roller-Walker robot which also had 4-DoF limbs and could orient the ankle joint to toggle between multiple modes of mobility: walking and rolling. Each of the 4 foot modules was modified with an external thin-section ball bearing whose inner race is press fit to the outer diameter of the foot module. A rubber oring tire is installed around a machined aluminum rim. The bearing introduces a passive torsional degree of freedom at the end-effector. With this modified foot module and ankle joint, Snake Monster can change the effective ground contact element between its static rubber foot or its passive wheel.
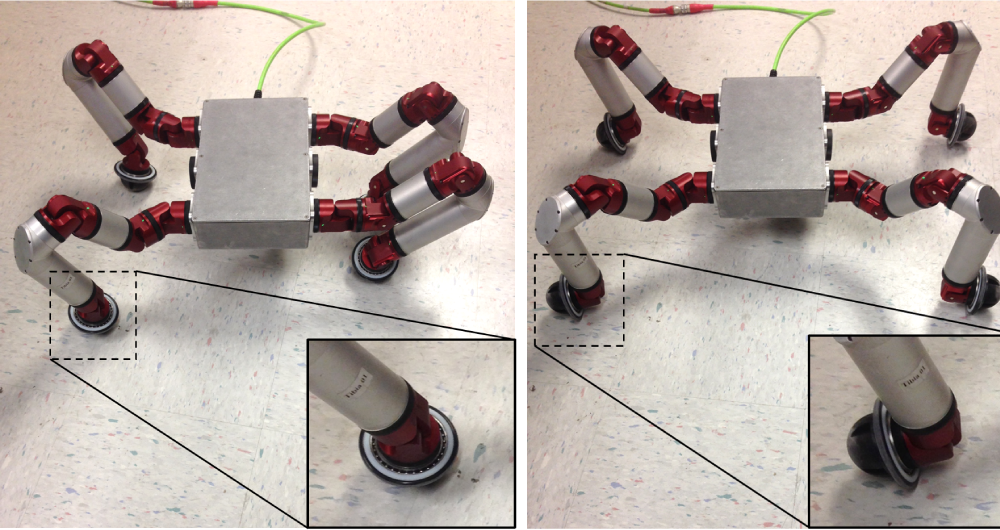
Figure 2: Snake Monster is reconfigured into a quadruped with 4-DOF limbs, using the ankle joints to orient the end-effector to be a foot (left) or a passive skating wheel (right).
The hexapod is configured with three legs on opposite sides of a rectangular aluminum body box. The quadruped is configured to have four legs - 2 on either side of the same body box. In addition to the hexapod and quadruped configurations, a biped is also constructed. The biped is kinematically configured to have 5-DoF legs and 2-DoF arms.
The hexapod's high-level controller first initializes and sets the low-level cascade PID gains for position, velocity, and torque loops. To achieve a compliant stance sensitive to the environment and external disturbances, the position gains are set relatively low in comparison to the torque gains. This gain scheme achieves compliance by emphasizing joint torques that support the weight of the body in stance rather than joint positions which merely command the foot to a specific position. This loose position servoing enables the body to be pushed or pulled in any direction relative to stationary stance feet.
Initial roller-skating locomotion demonstrated maximum speeds of up to 0.5 m/s. In rolling mode the minimum turning radius was estimated to be 0.5 meters. With optimization of the gait parameters, higher speed, increased stability, and a reduced turn radius is certainly feasible.
The quadruped, roller-walker, achieves its multi-modal mobility by being able to walk or roll on passive wheels. Multi-modal mobility offers advantages in terrain navigation by adjusting or adapting gait to best suit a given terrain. On rough terrains Snake Monster Roller-Walker can use a wave gait to prioritize stability and navigability. On flat ground or paved surfaces the quadruped can switch to roll mode which prioritizes energy efficiency and reduces cost of transport (Figure 2).
To achieve robust active balancing and walking an accurate knowledge of the biped's state variables must be estimated. Snake Monster biped uses the same complimentary filter as the hexapod to determine gravitational orientation of the body. In the case of the biped only 4 redundant IMU's are used. The 4 IMUs are located in the most proximal joint of each limb which is rigidly connected to the body.
After implementing each incremental strategy of the balancing controller a series of experiments were conducted to test the ability of the biped to recover from externally applied disturbances. The experiments focused primarily on longitudinal stability and ignored active lateral stabilization because the support polygon is inherently larger in the lateral direction than the longitudinal direction.
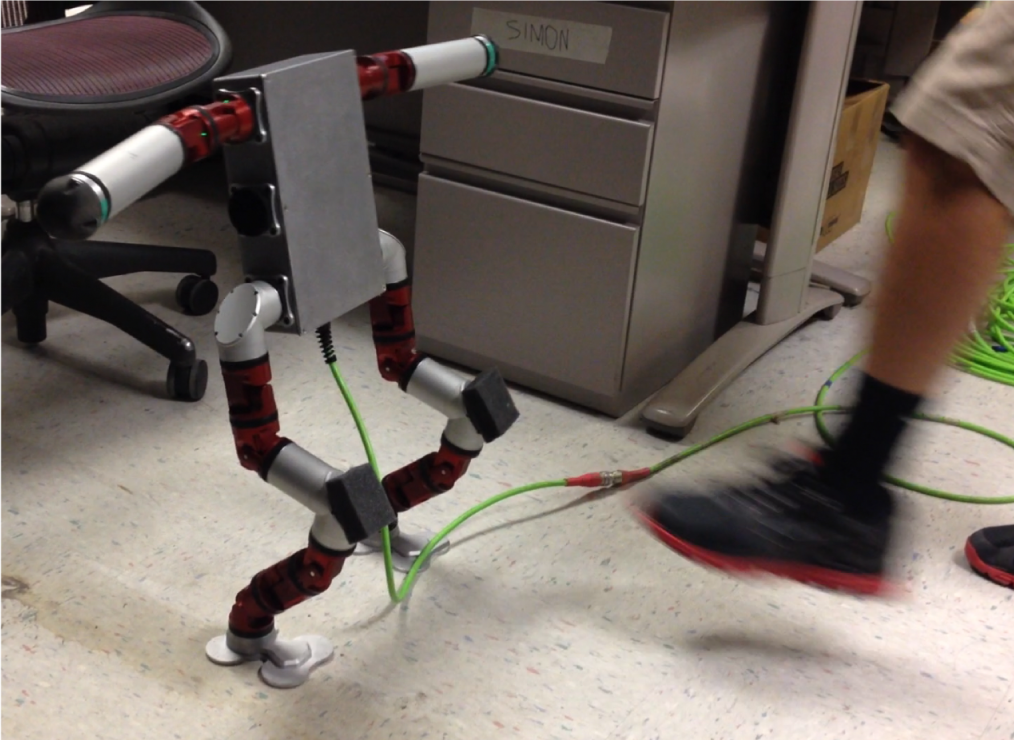
Figure 3: Snake Monster Biped using ankle torque strategy and arm control to recover its balance from a kick.
Snake Monster Biped balancing experiments