
Trunk Snake Robot
The main challenge in designing snake robots deals with putting actuated joints in a tight volume where we minimize the length and cross sectional areas of the links between the joints. The main concept of our design, as well as many others, is to stack two degree-of-freedom joints on top of each other, forming a snake robot. There are three main schools of designs for these kinds of robots: actuated universal joints, angular swivel joints and angular bevel joints.
Actuated Universal Joints
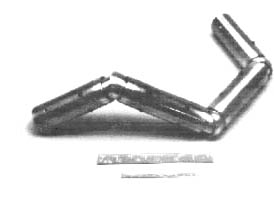
Figure 1: Double orthogonal revelute joint.
The simplest design that first comes to mind is stacking simple revolute joints as close as possible to each other and this led to the actuated universal joint design. As the name suggests, he design incorporates a universal joint with two motor to actuate each of the two degrees of freedom of the universal joint. There are many variations of this design: The simplest of which is just stacking revolute joint orthogonally and as close to each other as possible, as seen in Figure 1. These kinds of designs tend to be bulky and slow, hence not appropriate for many snake robot applications.
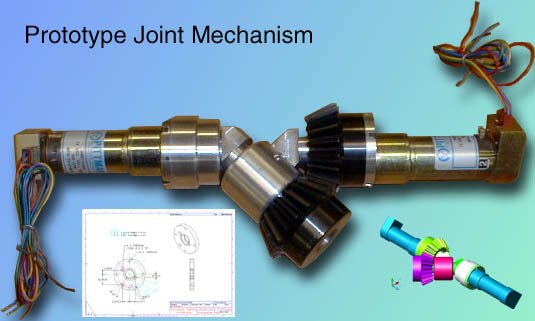
Another variation of this design approach is by using bevel or worm gear trains as seen in Figure 2 or using push-pull rods, as seen in Figure 3.






The main challenge in this design approach is to make the joint as compact as possible, yet strong enough and with appreciable bending range. One of the main benefits of this design is that you need only one motor to actuate one degree of freedom as opposed to the rest of the designs described here where two motors are actuated at all times. However, the torques transferred to the motor are relatively larger hence the need of higher reduction. Usually the high reduction is done by using power screws of worm gears hence the slowness of the mechanism.
Figure 2: Using worm gears.
Figure 3: Push-pull design approach used in EOD snake robot.
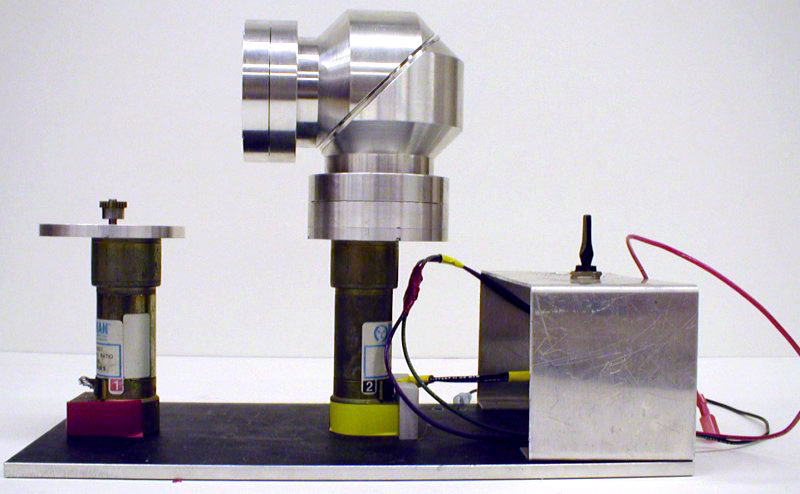
Angular Swivel Joint Design

The second design that evolved was the angular swivel joint, which is present in the JPL Snake Robot. These are much more compact two DOF joints. The design is simple: starting with a sphere, then slicing the sphere into two parts such that the slice plane is transversal to the south-north pole axis of the sphere. Now rotate one half sphere with respect to the other and notice the motion of the north pole as it traverses a cone of revolution. Connecting two adjacent snake bays via a passive universal joint and then by coordinating the rotation of the two spherical cups generated two degrees of freedom: In-plane bending and orientation. This is the most compact joint design till now. However here we are trying to develop a new compact two DOF joints.
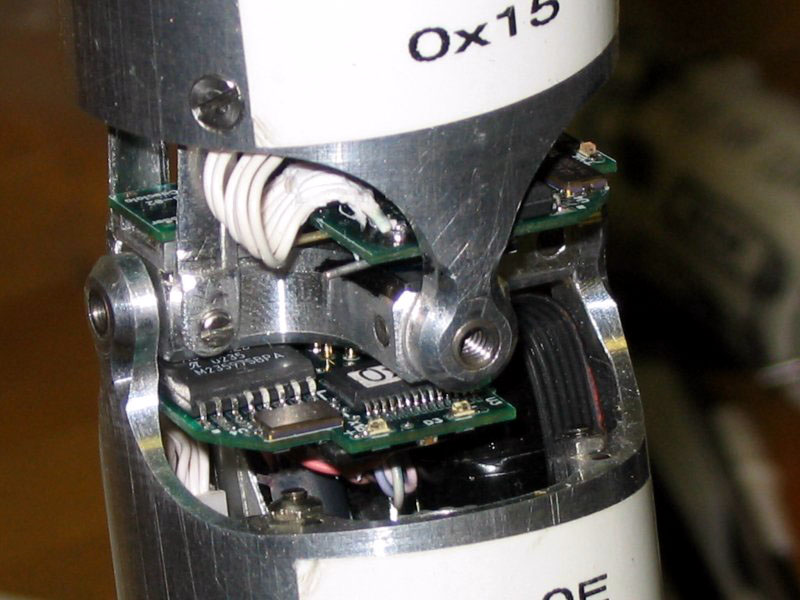
Angular Bevel Joint Designs
Here we are trying to develop a new compact two DOF joints. We work on optimizing the size, strength, reachability and flexibility of these joints. So far we have designed three new types of joints. We have already designed and built many prototypes:
Angular Bevel
Orientation Preserving
Gearless
Double Angular Bevel