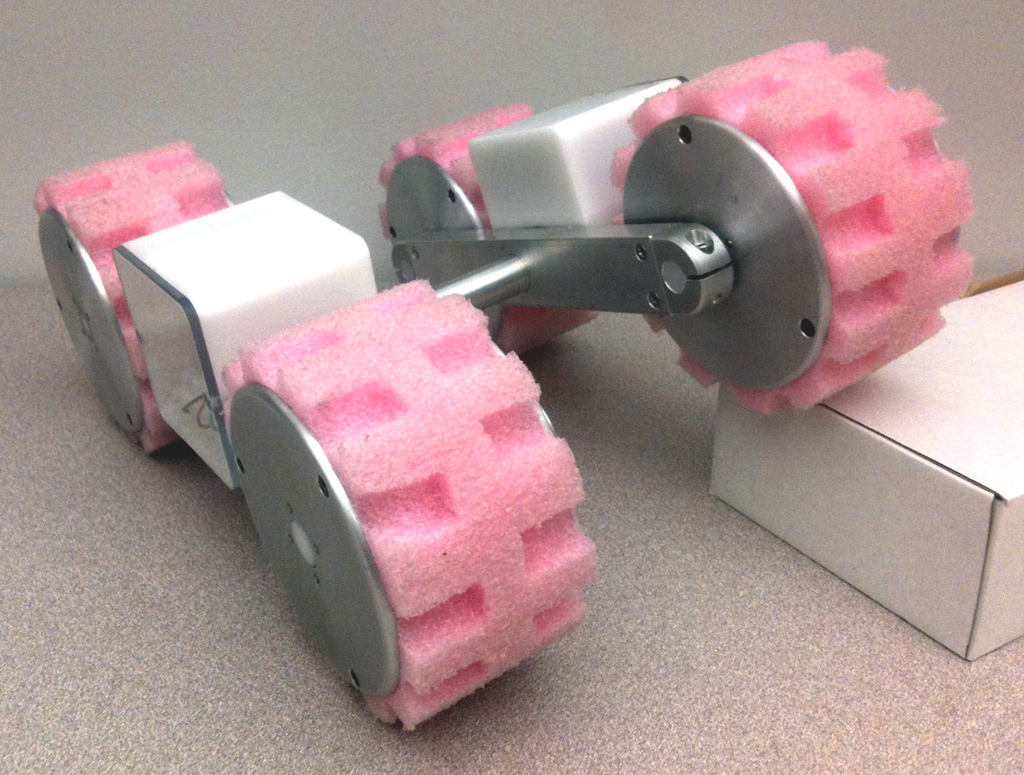
Fullabot
Fullabot is a passage crawler robot created to navigate small passages in Egyptian monuments, as well as for urban search and rescue. With a footprint smaller than a piece of paper and a height of 4 inches, this robot can maneuver effectively in extremely tight spaces. With actuated suspension, large wheels, and an extremely low center of gravity, Fullabot can also climb over rough terrain.
This project was headed by Gregg Podnar.