Overview
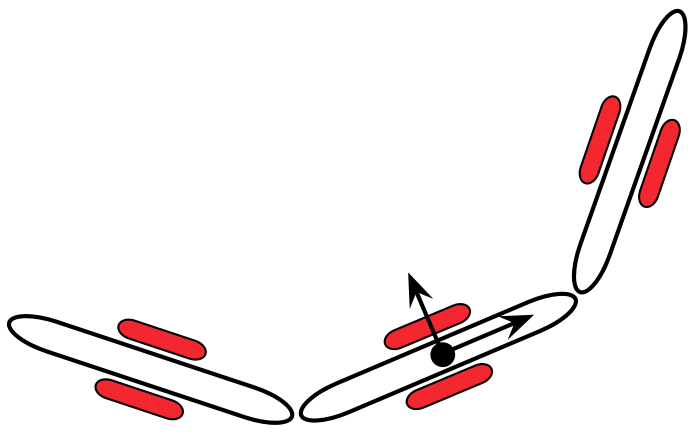
This course is a problem-driven exploration of concepts in differential geometry and geometric mechanics. Starting from simple physical examples, we build up to rigorous notions of length and curvature that form the foundations of differential geometry. We emphasize relationships between familiar constructs in vector calculus and their generalizations in differential geometry. Specific topics include tangent and cotangent spaces; differential forms; Lie groups, algebras, and brackets; distance metrics; and Hodge-Helmholtz decompositions. These topics are applied to example systems drawn from areas such as nonholonomic mechanics, low Reynolds number swimming, and inertial control systems such as satellites.